Pick and Place with Semantic Instance Segmentation in Omniverse Isaac
In this blog post, we will pick and place simple cubes onto a conveyor belt with the Panda robotic arm in NVIDIA’s […]
Ihr Partner für Robotik und Simulation
Ihr Partner für Robotik und Simulation
In this blog post, we will pick and place simple cubes onto a conveyor belt with the Panda robotic arm in NVIDIA’s […]
In this blog post, we will add a suction gripper to the Panda robotic arm in NVIDIA’s Omniverse Isaac simulation environment. In […]

In this blog post, we will import an existing robotic arm model into NVIDIA’s Omniverse Isaac simulation environment and create a ROS […]
In this blog post I will present a collision detection algorithm specifically tailored for use with Panda. The algorithm was developed as […]
In this blog post we are going to construct a minimalist web interface that shows information about the robot’s current state in […]

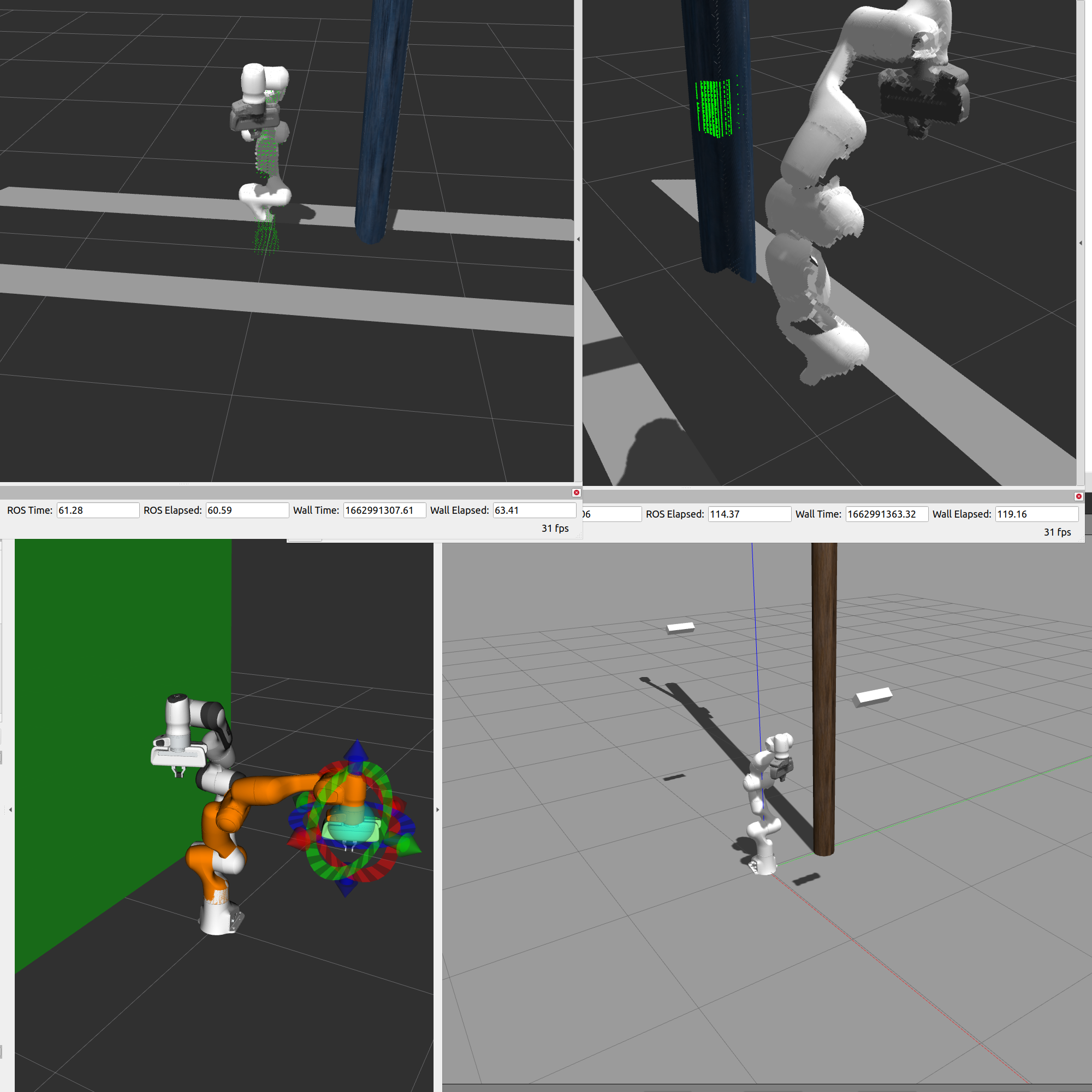
In this post we implement a ROS node that automatically initializes the robot state in Gazebo to a valid configuration . This is achieved by means of a custom joint position controller and the controller switching mechanism provided by the controller manager.

In this post we will alter the integration by replacing the effort controllers with joint position based controllers and thereby improve the stability of the robot during trajectory execution. We will also fix issues when starting the robot in Gazebo where it gets initialized with invalid joint angles by implementing a custom controller that commands the joints to fixed state.

In this post I am going to share my workflow for using Visual Studio Code as a development environment for ROS within a Docker container.

In this post we are going to attach a simple box to the hand of Panda robot in the Gazebo simulation environment.

In this post I am going to share my workflow and best practices for using Visual Studio Code as a development environment for ROS.