Pick and Place with Semantic Instance Segmentation in Omniverse Isaac
In this blog post, we will pick and place simple cubes onto a conveyor belt with the Panda robotic arm in NVIDIA’s […]
Ihr Partner für Robotik und Simulation
Ihr Partner für Robotik und Simulation
In this blog post, we will pick and place simple cubes onto a conveyor belt with the Panda robotic arm in NVIDIA’s […]

In this blog post, we will import an existing robotic arm model into NVIDIA’s Omniverse Isaac simulation environment and create a ROS […]
In this blog post I will present a collision detection algorithm specifically tailored for use with Panda. The algorithm was developed as […]

In this post we are going to attach a simple box to the hand of Panda robot in the Gazebo simulation environment.

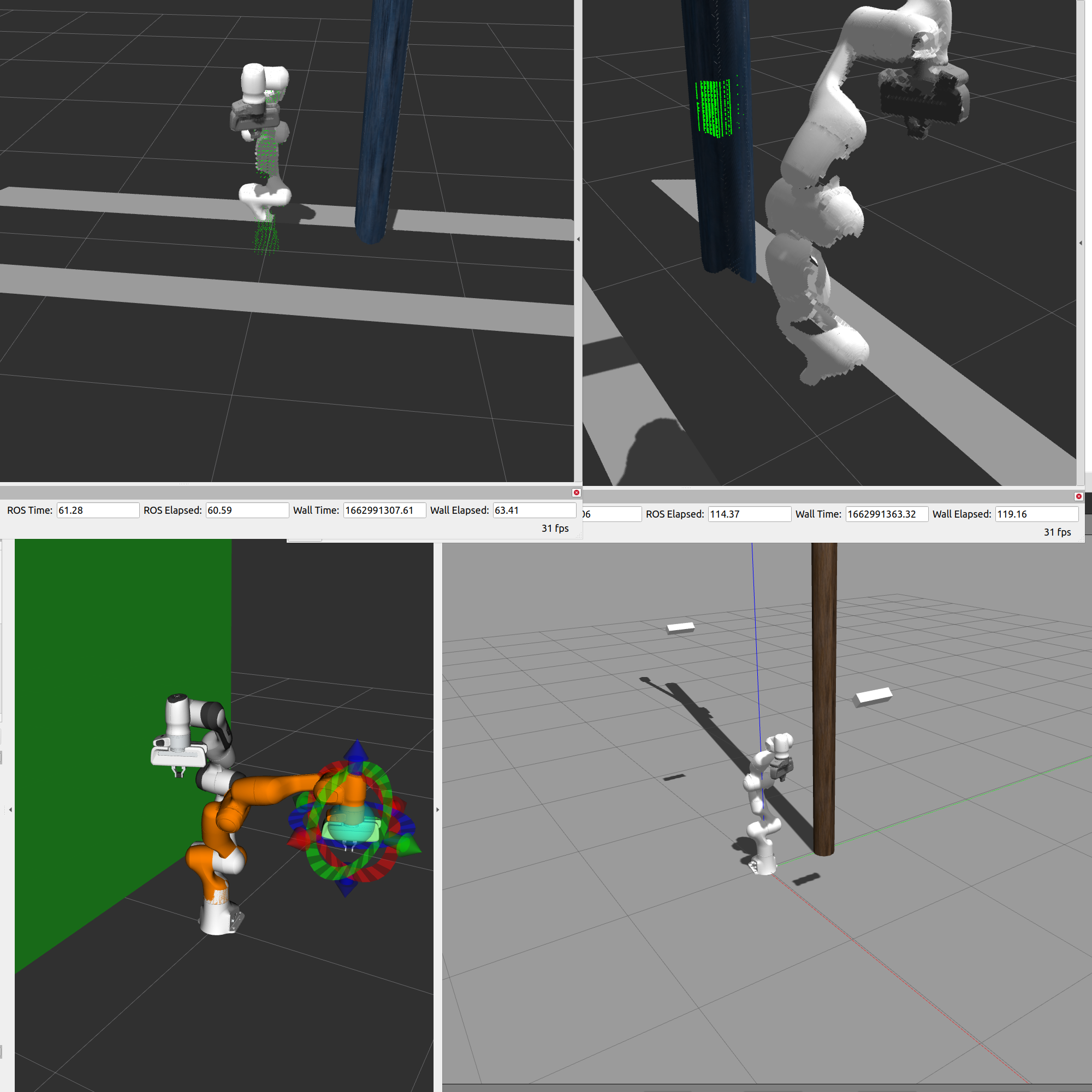
In this post we are going to utilize MoveIt! in order to navigate Panda in a cluttered environment in the Gazebo simulation.

In this post I will outline a step-by-step procedure to simulate the Panda robot in Gazebo and connect it to MoveIt! for motion planning.