Willkommen in meinem Portfolio! Ich bin ein spezialisierter Roboter-Softwareentwickler für die Programmierung, Gestaltung und Integration von Software in robotischen Systemen, mit einer umfangreichen Erfahrung in der Anwendung des Robot Operating Systems (ROS). Meine Leidenschaft für Innovation und Problemlösung treibt mich an, Lösungen zu entwickeln, die die Effizienz und Fähigkeiten von Maschinen verbessern. Entdecken Sie, wie ich durch fortschrittliche ROS-Anwendungen die Zukunft der Robotik mitgestalte.
Über mich
Als engagierter Roboter-Softwareentwickler mit über sechs Jahren Erfahrung und einer Promotion in der Informatik von der Technischen Universität München, habe ich meine Fähigkeiten in akademischen und industriellen Umgebungen geschärft. Ich habe tiefgreifende Kenntnisse in den Programmiersprachen C++ und Python und bin spezialisiert auf das Robot Operating System (ROS), das als Kernplattform für meine Projekte im Bereich der Robotik dient. Mein Ziel ist es, durch Automatisierung komplexe Probleme zu lösen und das tägliche Leben zu verbessern.

Erfahrung & Expertise
- 6+ Jahre Erfahrung in Robotik Projekten
- Tiefgreifende Kenntnisse in ROS (Robot Operating System) und verwandten Projekten wie z.B. MoveIt!, RViz und PCL (Point Cloud Library)
- Erfahrung in Modellierung und Simulation von Robotern in Nvidia Omniverse Isaac und Gazebo
- 3D Modellierung von Bauteilen u.a. für Nutzung mit Roboterarmen
- Erfolgreiche Historie realisierter Projekte in der Wirtschaft und im akademischen Umfeld
- Erfahrung in der Programmierung von Robotern diverser Hersteller: Franka Emika, ABB, Universal Robots, Yaskawa
Dienstleistungen
Simulationen in NVIDIA Omniverse Isaac
Ich unterstütze Sie in der Modellierung und Integration von Robotern für Omniverse Isaac. Für die Steuerung der Roboter mit NVIDIA Lula oder ROS helfe ich Ihrem Team gerne mit der Implementierung.
Robotik Entwicklung mit ROS
Ob für die Stärkung Ihres Teams in einem bestehenden Projekt, oder für die Entwicklung eines neuen Prototypen – ich unterstütze Sie mit meiner Expertise bei der Umsetzung Ihrer Idee.
Schulungen und Workshops
Ihr Team möchte die Grundlagen der Roboter-Steuerung mit ROS erlernen oder in die Entwicklung mit der Simulationsumgebung NVIDIA Omniverse Isaac einsteigen? Ich vermittle Ihrem Team vom Einstieg bis hin zu fortschrittlichen Themen wie Manipulation und Sicherheit das notwendige Wissen für das nächste Projekt.
Projektplanung und Umsetzung
Sie möchten ein Robotik- oder Simulationsprojekt von der Planung bis zum Einsatz in der Praxis sicher und planbar umsetzen? Ich unterstütze Sie gerne in dieser Aufgabe und betreue Ihr Team im Hinblick auf technisch anspruchsvolle und pünktliche Projektumsetzung.
Portfolio
- C++
- Standardbibliotheken
- Boost
- Eigen
- Python
- NumPy
- SciPy
- Matplotlib
- JavaScript
- ReactJS
- OpenCL
- Robot Operating System (ROS)
- MoveIt!
- RViz
- PCL
- NVIDIA Omniverse Isaac: Digitale Zwillinge und realitätsnahe Simulationen mit Physik und Raytracing
- Gazebo: Simulation von Robotern in ROS-Projekten
- OpenCV: Bilderkennung und Manipulation
- Docker: Plattformunabhängige Entwicklung
- Autodesk Inventor: 3D Modellierung von Bauteilen
- OpenCL: Programmierung von Grafikbeschleunigern für beschleunigte Ausführung von Algortihmen
- GitLab CI: Continuous Integration für Qualitätssicherung in Softwareprojekten
- Sämtliche Themen im Themengebiet der Robotik, insbesondere Kinematik
- Kamerasysteme und ihre theoretischen Grundlagen
- Komptenzen in der mathematischen Modellierung von komplexen Sachverhalten, insbesondere für geometrische Probleme
Projekte
Industrial Metaverse Prototyp mit ROS und Omniverse Isaac
Ich unterstützte einen Kunden aus der Elektronik- und Sensortechnologiebranche bei der Entwicklung eines Prototypen für die Markteinführung eines Sensorsystems. In einem Industial Metaverse Setting auf Basis von NVIDIAs Omniverse Isaac Simulation sollten Roboterarme verschiedener Hersteller integriert werden. Basierend auf Sensorsignalen, sollte die Geschwindigkeit der Roboterarme angepasst oder sogar gänzlich gestoppt werden.
Folgende Aufgaben übernahm ich im Laufe dieses Projekts:
- Erstellen von ROS-Integrationen aus Geometriedaten und CAD-Dateien für vier Roboterarme (ABB, FANUC, Yaskawa und Universal Robots)
- Definieren der Robotermodelle
- Konfigurieren der Bewegungsplanungspipeline MoveIt
- Konfigurieren der Regler in ROS Control
- Importieren der Robotermodelle in die NVIDIA Omniverse Isaac Simulation
- Erweitern einer Python-Extension für Steuerung der Roboterarme in Isaac Simulation
- Erstellen eines ROS-Pakets für die Steuerung der Roboterarme und ihren Austausch im laufenden System mit ROS2 Humble
- Schulen der Mitarbeiter in ROS2 Humble
Die Resultate dieses Projekts stellte mein Auftraggeber auf einer Messe, einer Entwicklerkonferenz und in einer Fachzeitschrift vor.
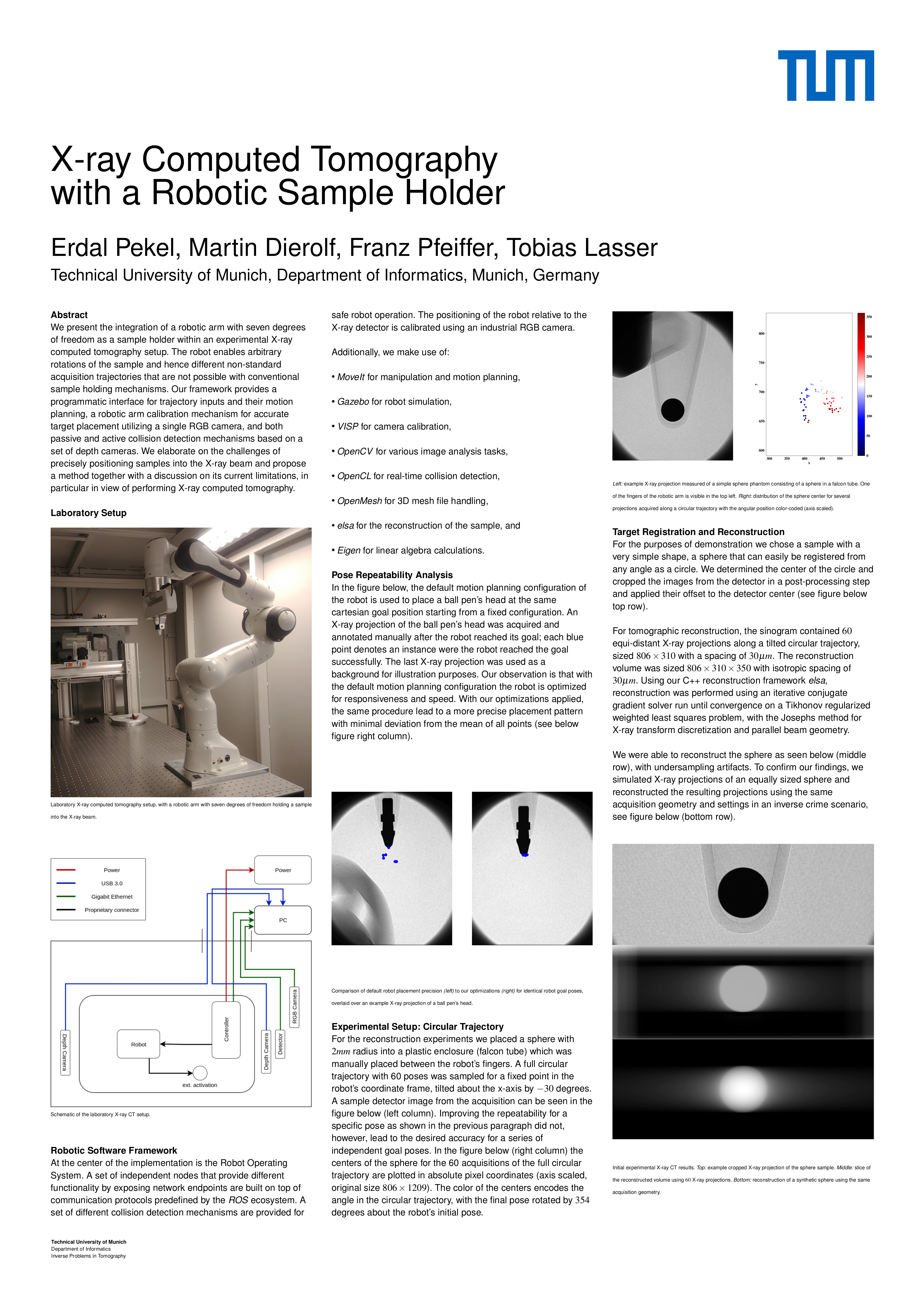
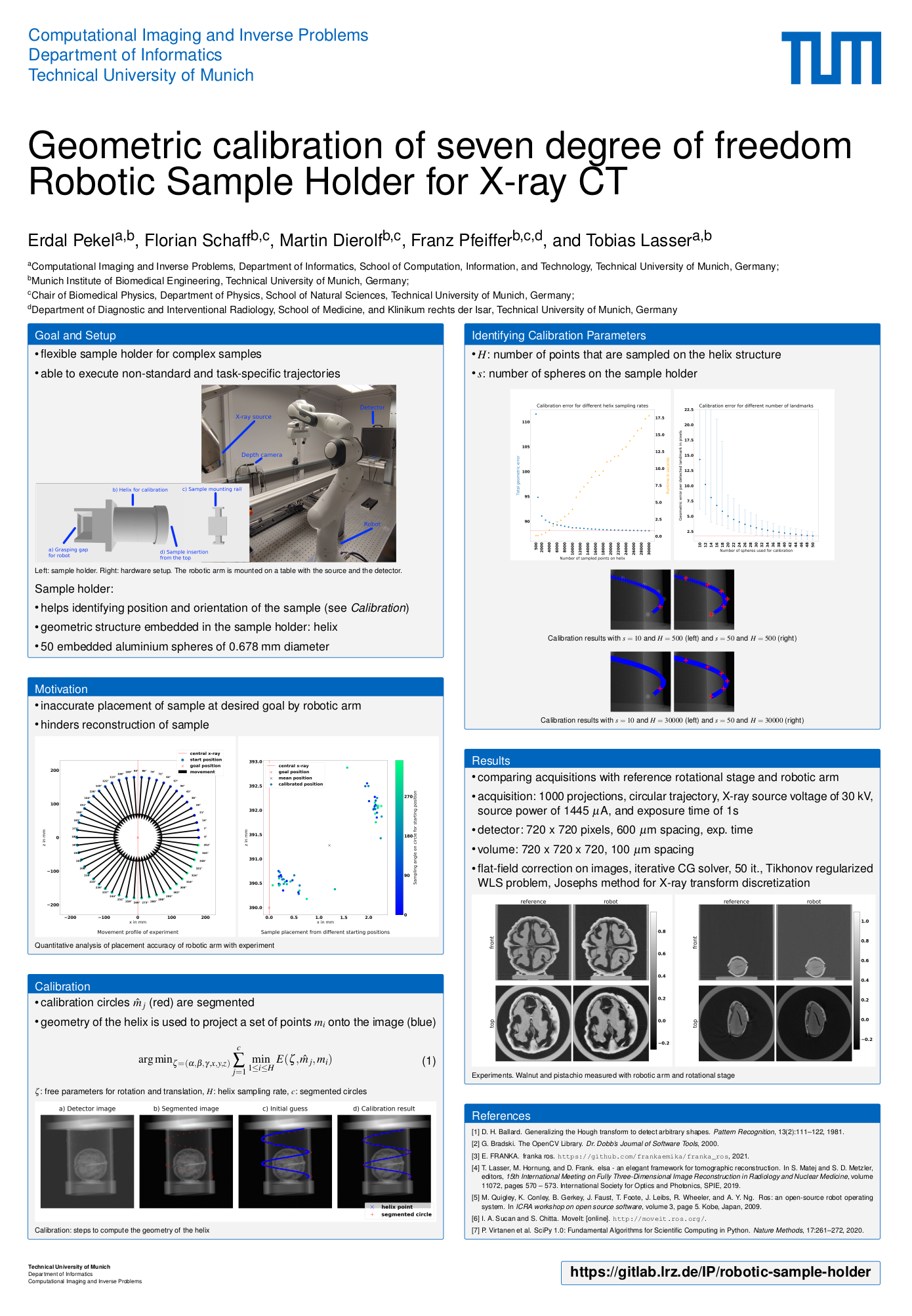
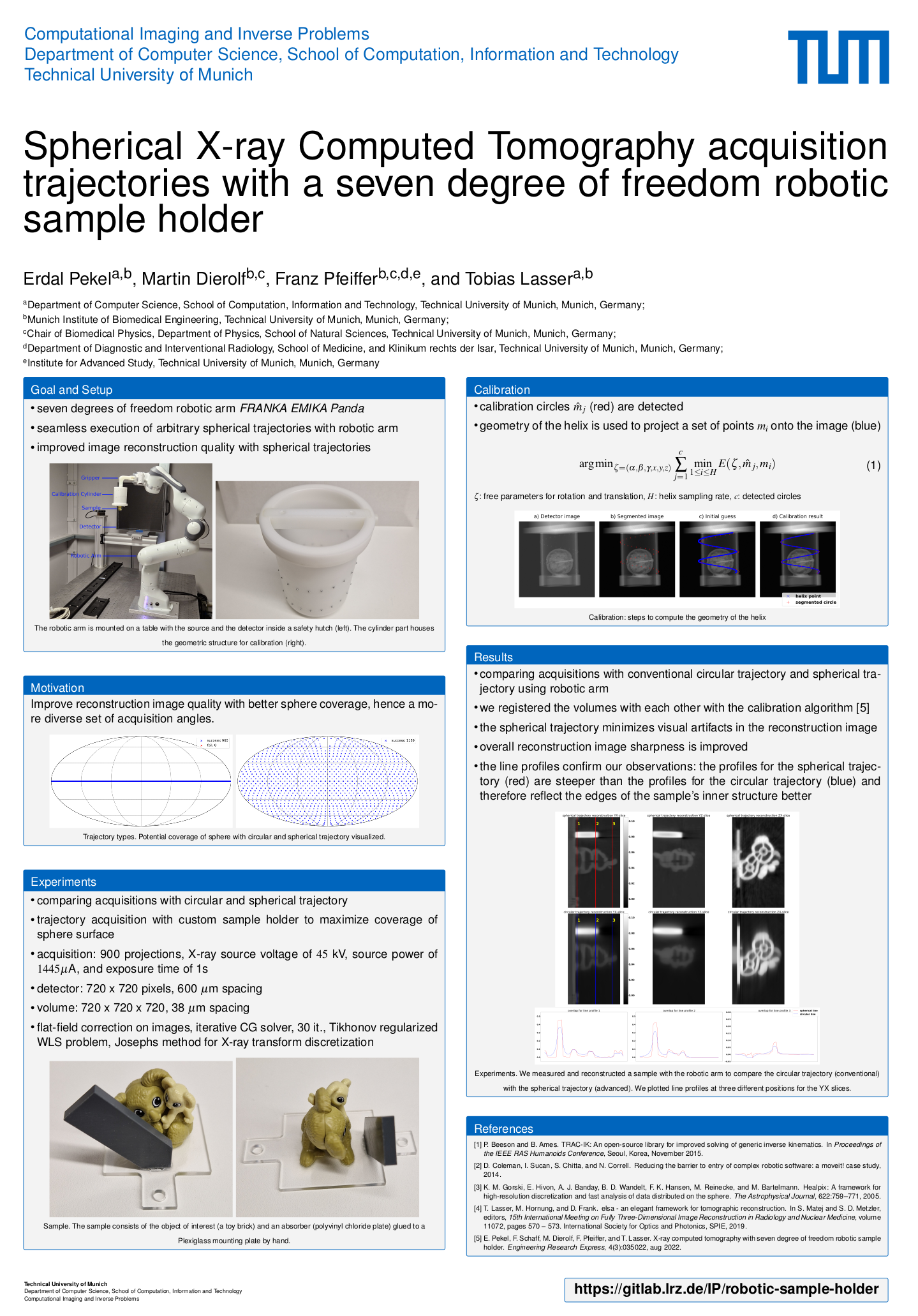
Robotischer Probenhalter für Röntgen Computertomographie
In meiner Doktorarbeit integriere ich einen industriellen Roboterarm in einem CT-Labor für die flexible Bildgebung von Proben. Zu meinen Aufgaben in diesem Projekt gehörten
- die Simulation und Steuerung des FRANKA EMIKA Panda Roboterarms
- die Entwicklung von Probenhaltern mittels 3D-Druck Verfahren
- die geometrische Kalibrierung der exakten Position der Proben auf den CT Aufnahmen mit Probenhalter und Optimierungsalgortihmen
- die Entwicklung von intelligenten Aufnahmestrategien für optimale Bildqualität und reduzierte Strahlendosis
- das Erstellen einer Web-basierten Benutzeroberfläche für die Steuereung des Roboterarms und die Visualisierung der Messergebnisse
Die Software für die Steuerung des Roboterarms integrierte ich mit folgenden Komponenten in ein eigenständiges Software-Paket:
- ROS Middleware für effizienten Datenaustausch zwischen unabhängigen Prozessen
- Sichere Manipulation des Roboterarms mittels MoveIt! Framework, inklusive persistenter Kodierung der Umgebung für die Kollisionsdetektion
- Implemetieren von ROS-Prozessen zur Robotersteuerung mit C++, hauptsächlich unter Nutzung der Standard- sowie Boost-Bibliotheken
- Implemetieren von ROS-Prozessen zur Kalibrierung und Bildanalyse mit Python, hauptsächlich unter Nutzung von Bibliotheken wie NumPy, SciPy und OpenCV
- Positionierungsplanung des Roboterarm End-Effektors am Ziel für Proben mit dynamischer Größe
- Trajektorienplanung und Persistenz für zirkuläre, spherische sowie dynamische Trajektorien mit Recovery-Routine im Falle fehlerhafter Ausführung
- Erstellen und Aktualisieren der Koordinatentransformationen mittels tf Komponente
- Schnittstellendefinitionen für Datenaustausch zwischen Prozessen
- Visualisierung mittels RViz und eigener ReactJS Web-Oberfläche
- Simulation des Roboterarms in Gazebo
- Erstellen einer Continuous Integration Pipeline in GitLab
- Bereitstellen verschiedener Docker-Images für Entwicklung und CI
Vorträge
Using Industrial Robotic Arms In NVIDIA Omniverse Isaac Sim
ROS Industrial Meetup Stuttgart, Fraunhofer IPA Stuttgart, 18. September 2024 (Veranstaltungswebsite, Folien)
Publikationen




Zertifikate
Kontakt
Interessiert an einer Projektbesprechung oder einer möglichen
Zusammenarbeit? Lassen Sie uns in Kontakt treten! Sie erreichen mich per
E-Mail unter info@erdalpekel.de oder telefonisch unter +49 7541 / 5027701.
Folgen Sie mir auf LinkedIn, GitHub und meinem Blog, um mehr von meiner Arbeit zu
sehen und auf dem Laufenden über meine neuesten Projekte zu bleiben.